รถเข็นสำหรับคนพิการควบคุมด้วยระบบไมโครคอนโทรลเลอร์
คำสำคัญ:
ระบบไมโครคอนโทรลเลอร์, รถเข็นสำหรับคนพิการบทคัดย่อ
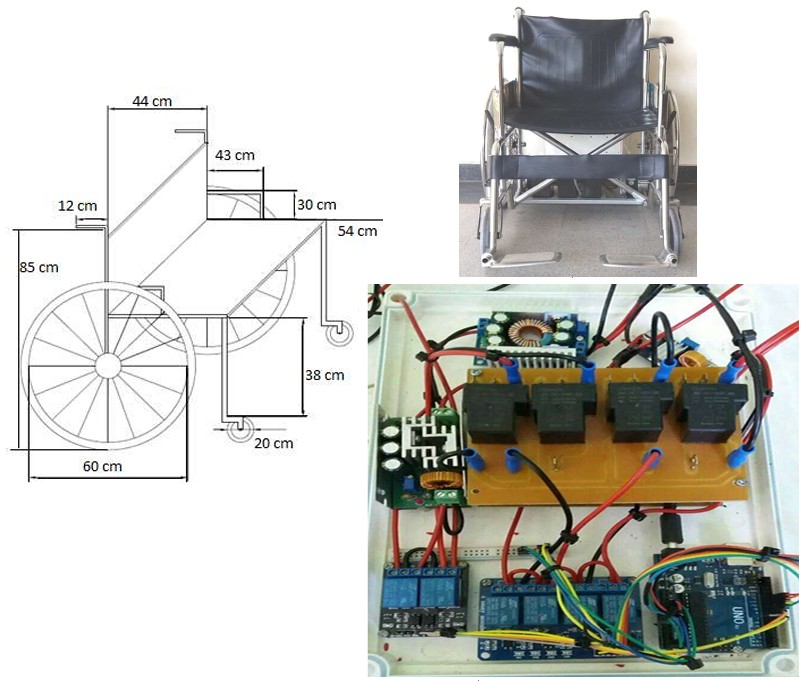
การวิจัยครั้งนี้มีวัตถุประสงค์เพื่อออกแบบและสร้างรถเข็นสำหรับคนพิการควบคุมด้วยระบบไมโครคอนโทรลเลอร์ และเพื่อทดสอบประสิทธิภาพจากเครื่องมือที่สร้างขึ้น เครื่องมือที่ใช้ในการวิจัยประกอบไปด้วยชุดอุปกรณ์จอยสติ๊ก (Joystick) ในการควบคุมระบบขับเคลื่อนที่ทิศทางของมอเตอร์ในการขับเคลื่อนที่หน้า-หลัง เลี้ยวซ้าย เลี้ยวขวา และคำสั่งหยุดรถเข็น และระบบไมโครคอนโทรลเลอร์เป็นตัวควบคุมการขับเคลื่อนที่ของมอเตอร์ในการส่งค่าสัญญาณพัลส์วิดท์มอดูเลชัน
จากผลการวิจัยทดสอบหาประสิทธิภาพความเร็วในการเคลื่อนที่แนวราบ พบว่าความเร็วในช่วงระยะทาง 50 เมตร ที่น้ำหนัก 90 กิโลกรัม ใช้เวลา 1.26 นาที และผลการทดลองความเร็วในการเคลื่อนที่รถเข็นสำหรับคนพิการขึ้นในแนวลาดเอียง 10 องศา พบว่าความเร็วในช่วงระยะทาง 50 เมตร ที่น้ำหนัก 90 กิโลกรัม ใช้เวลา 2.07 นาที และผลการสำรวจความพึงพอใจของผู้ใช้งานรถเข็นสำหรับคนพิการ โดยทำการวิเคราะห์ข้อมูลจากกลุ่มตัวอย่างจำนวน 20 คน พบว่ามีค่าเฉลี่ยความพึงพอใจของผู้ใช้งานเท่ากับ 4.28 ซึ่งมีค่าเฉลี่ยอยู่ในระดับมาก
เอกสารอ้างอิง
คมสัน มุ่ยสี กฤษณะ จันทสิทธิ์ และศรายุทธ์ จิตรพัฒนากุล. “การประยุกต์ใช้ระบบควบคุมสำหรับรถนั่งคนพิการชนิดมือบังคับการเคลื่อนที่.” วารสารวิจัยรำไพพรรณี. ปีที่ 12, ฉบับที่ 2 เดือนพฤษภาคม - สิงหาคม 2561, หน้า 190-199.
เดชฤทธิ์ มณีธรรม. “รถเข็นไฟฟ้าอัจฉริยะ ควบคุมด้วยเสียงและศีรษะ.” เวชสารแพทย์ทหารบก. ปีที่ 69, ฉบับที่ 4 ตุลาคม-ธันวาคม 2559, หน้า 177-184.
สายฝน โคตรโสภา. “ระบบควบคุมและตรวจสอบสถานะผู้นั่งรถเข็นไฟฟ้าแบบไร้สายสำหรับช่วยเหลือผู้พิการและผู้สูงอายุ.” วิทยานิพนธ์หลักสูตรวิศวกรรมศาสตรมหาบัณฑิต สาขาวิชาวิศวกรรมคอมพิวเอตร์และโทรคมนาคม คณะวิศวกรรมศาสตร์ มหาวิทยาลัยธุรกิจบัณฑิตย์, 2555.
ชายแดน บุญลือ. “รถเข็นผู้ป่วยไฟฟ้า ถูกใจ ถูกสตางค์.” [สืบค้นเมื่อวันที่ 8 ตุลาคม 2562]. จาก http://www.mtts.ac.th/pdf/ElectricWheelChairs.pdf.
สมถวิล ดอนเหลือม และบัณฑิต นาคทั่ง. “การพัฒนารถเข็นผู้พิการต้นทุนตํ่า.” ปริญญานิพนธ์หลักสูตรวิศวกรรมศาสตรบัณฑิต สาขาวิชาวิศวกรรมอุตสาหการ คณะวิศวกรรมศาสตร์และสถาปัตยกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลอีสาน, 2555.