Line-following and Object-detecting Robot
Keywords:
Line-following Robot, Sensor-based NavigationAbstract
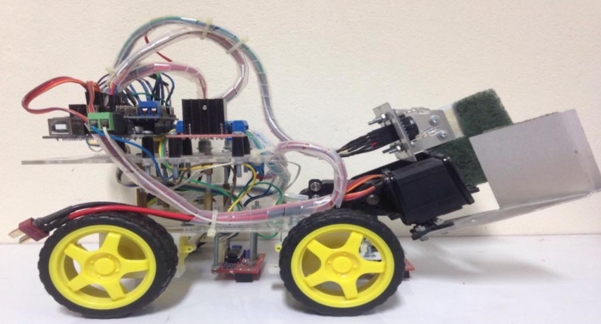
This research aims to design and develop a line-following and object-detecting robot. The tools and components used include wheels, servo motors, an Arduino Mega2560 board, motor driver board, switching power supply, LiPo battery, color sensor, and line tracking sensor. The experiment measured the robot's movement speed by adjusting the pulse width. At a pulse level of 45, the speed recorded was 2.57 minutes; at level 55, it was 2.47 minutes; at level 65, it was 2.43 minutes; and at level 75, the speed improved to 2.31 minutes.
References
Oswal, S., & Saravanakumar, D. (2021). Line following robots on factory floors: Significance and Simulation study using CoppeliaSim. IOP Conf. Series: Materials Science and Engineering. 1012(1), 012008. doi: 10.1088/1757-899X/1012/1/012008
Rihem, F., & Khaled, A. (2023).Vision Navigation Based PID Control for Line Tracking Robot. 35(1), pp. 901–911. doi: 10.32604/iasc.2023.027614
Abdellatif, M. (2013). Color-Based Object Tracking and Following for Mobile Service Robots. International Journal of Innovative Research in Science, Engineering and Technology, 2(11), pp. 5921–5928.
Farooq, U., Amar, M., Asad, M. U., Abbas, G., & Hanif, A. (2014). Fuzzy Logic Reasoning System for Line Following Robot. International Journal of Engineering and Technology. 6(4), pp.244–248.
Shin, D., Cho, J. I., & Kim, J.-H. (2022). Environment-Adaptive Object Detection Framework for Autonomous Mobile Robots. Sensors, 22(19), 7647.