Wheelchairs for Disabled Control by Microcontroller System
Keywords:
Microcontroller System, Wheelchairs for DisabledAbstract
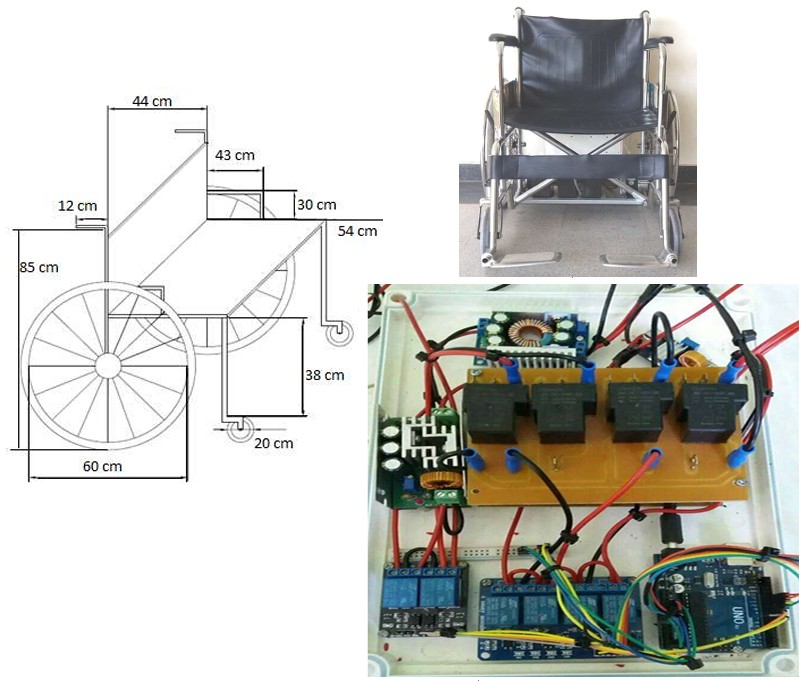
This research aimed to design and construction a wheelchair for disabled people with microcontroller system, and to test the efficiency from the tools created. The instrument used in the research consisted of joystick accessories set, in the control the driven system the direction of the motor is driven by the front-back, turn left, turn right and stop. And the microcontroller system is the controller that drives the motor in the signal transmission value of the pulse width modulation (PWM).
The study tested the effectiveness of horizontal movement speed, found that in the distance of 50 meters at the weight of 90 kg, take time was 1.26 minutes. And the test result of the wheelchair movement speed of wheelchair for disabled people rising on a 10-degree slope, found that the distance of 50 meters at a weight of 90 kg, take time was 2.07 minutes. And the satisfaction survey results of wheelchair users for the disabled data from 20 samples were analyzed, found that the average satisfaction of users is 4.28, which has a high level of average.
References
คมสัน มุ่ยสี กฤษณะ จันทสิทธิ์ และศรายุทธ์ จิตรพัฒนากุล. “การประยุกต์ใช้ระบบควบคุมสำหรับรถนั่งคนพิการชนิดมือบังคับการเคลื่อนที่.” วารสารวิจัยรำไพพรรณี. ปีที่ 12, ฉบับที่ 2 เดือนพฤษภาคม - สิงหาคม 2561, หน้า 190-199.
เดชฤทธิ์ มณีธรรม. “รถเข็นไฟฟ้าอัจฉริยะ ควบคุมด้วยเสียงและศีรษะ.” เวชสารแพทย์ทหารบก. ปีที่ 69, ฉบับที่ 4 ตุลาคม-ธันวาคม 2559, หน้า 177-184.
สายฝน โคตรโสภา. “ระบบควบคุมและตรวจสอบสถานะผู้นั่งรถเข็นไฟฟ้าแบบไร้สายสำหรับช่วยเหลือผู้พิการและผู้สูงอายุ.” วิทยานิพนธ์หลักสูตรวิศวกรรมศาสตรมหาบัณฑิต สาขาวิชาวิศวกรรมคอมพิวเอตร์และโทรคมนาคม คณะวิศวกรรมศาสตร์ มหาวิทยาลัยธุรกิจบัณฑิตย์, 2555.
ชายแดน บุญลือ. “รถเข็นผู้ป่วยไฟฟ้า ถูกใจ ถูกสตางค์.” [สืบค้นเมื่อวันที่ 8 ตุลาคม 2562]. จาก http://www.mtts.ac.th/pdf/ElectricWheelChairs.pdf.
สมถวิล ดอนเหลือม และบัณฑิต นาคทั่ง. “การพัฒนารถเข็นผู้พิการต้นทุนตํ่า.” ปริญญานิพนธ์หลักสูตรวิศวกรรมศาสตรบัณฑิต สาขาวิชาวิศวกรรมอุตสาหการ คณะวิศวกรรมศาสตร์และสถาปัตยกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลอีสาน, 2555.